さてアプリ「PAPI」の紹介から始まったこのコーナーですが、これからいよいよ応用編に移ろうと思います。
このホームページにおける私のモットーは、出来るだけ現実の結果を示して納得して頂く事です。
理論の話を沢山述べても、いざ現実の世界に応用出来ないようでは残念な結果に至ります。
最初にPAPIとILS Glideslopeのビームの関係をX-Planeと自力で開発した?3Dモデルを駆使しておさらいしましょう。

PAPIの詳しい設定条件はAIMに記載されていますが、詳細は後の機会に述べます。
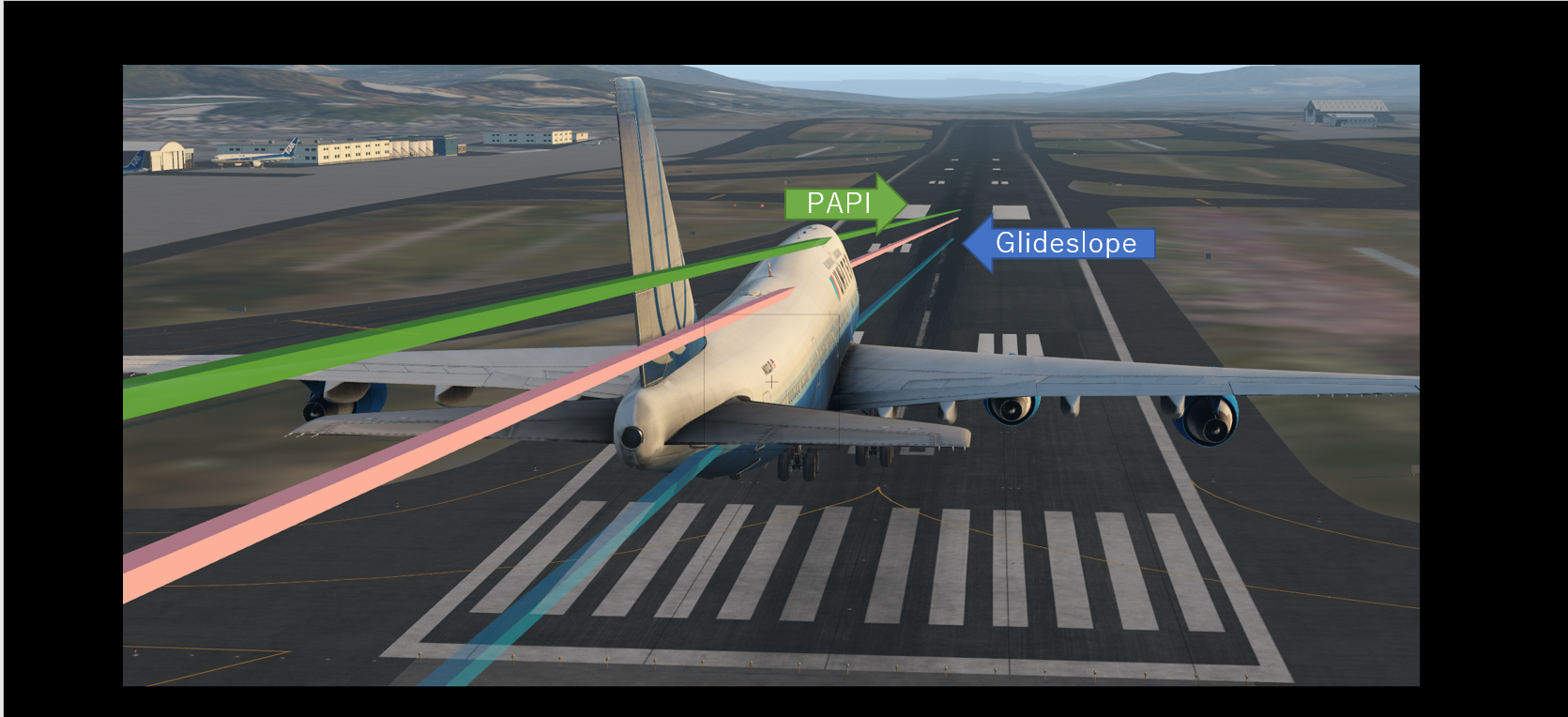
ここではB747-400が福岡RWY16のスレッシュホールドにさしかかった時の例を示して解説します。
PAPIは各滑走路を使用(離着陸)できる最大の航空機に合わせて設置されています。【AIM 153(注)】
上記のイラストはX-Planeの世界に、現実と同じ場所に合わせてPAPI,Glideslope、そしてAiming(目標点標識:豆腐の自分に近い方の端)の3°パスモデル(筆者が作成)を設置して、B747-400のモデル(フリーモデルです)をスレッシュホールドに移動させたものです。
この話にあたっては飛行機のGlideslopアンテナの位置が重要になります。
B747は他の機種と異なり、ノーズギアのドアにあります。
見て頂くと、B747がILSビームに乗っているときはコクピットのパイロットが見るPAPIの色は常に○○●●です。
とても理想的ですね。
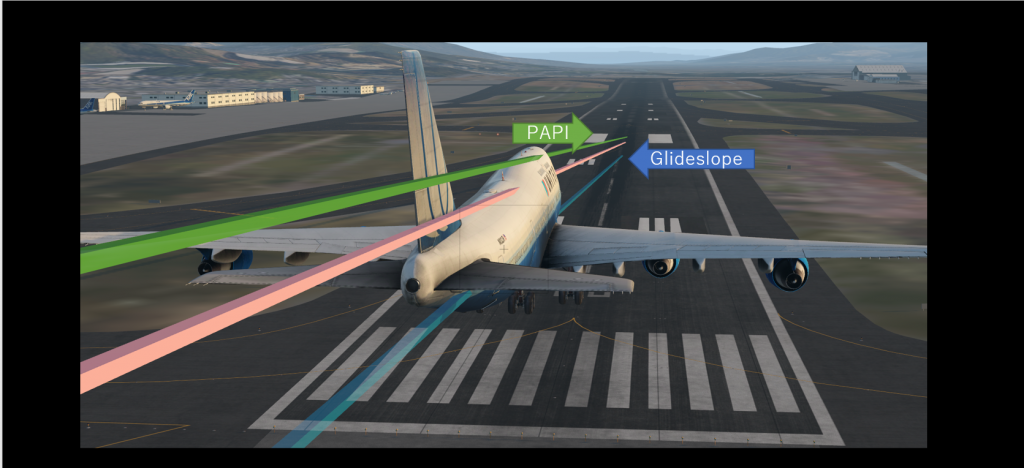
下記に別の視点から見た図を示します。
なお、接地帯標識(白いマーキング)は通常のX-Plane では現実とかなり違っているので、自力で書き換えています。つまり、現実の世界とマッチしたイラストです。
さて、B747から機体サイズを小さくしてE170型機に替えてみましょう。
随分と変わってくるのがおわかり頂けると思います。
Glideslopeに正確に追従しているとPAPIの中心(3°)から下に位置していることになります。
(E170型機のGlideslopeのアンテナの位置はB747型機とは異なる事にも着目して下さい)
これはE170型機に限定されたことでは無く、B767、B737等の航空機にも当てはまります。
つまり、多くの航空機がILSのGlideslopeに正確に追従していると、PAPIはある高度以下から「あなたは低いですよ」と示すのです。

このように書くと、ご自分が乗務している機種で福岡16に降りるときには一体何feetでPAPIの色が○○●●から ○●●●や●●●●に変わリ始めるのかと気になると思います。
最初にX-Planeで再現してみました。
接地帯のペイントを変更するのに試行錯誤の末、数日かかった事に加えて、前述の3Dポリゴンモデルを反映するのに構想から数年たってしまいましたが、いよいよ実現することが出来ました。
PAPIの色を認識しやすいように、X-Planeは夕方の景色にしてDA42という双発の小型機でILSをオートパイロットで飛行させました。
PAPIの色変化にご注目下さい。
さて、正確な計算に基づいて、色が変化する高度を求めたい場合はアプリPAPIの登場になります。
2021年8月から下図のように滑走路を選択すれば滑走路情報は自動的にアプリに取り込まれるように改修しました。
最初に基本的な考え方を次にに紹介しましょう。
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
AIPの福岡を探して
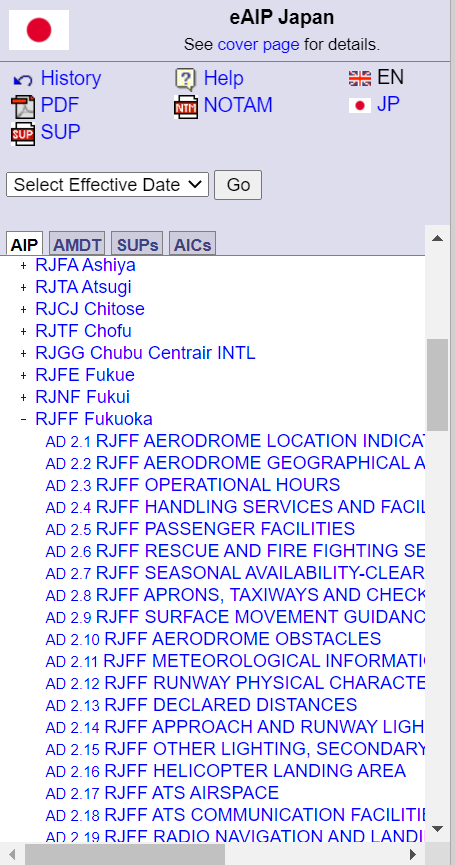
下記の情報を検索します。

GP:GlideSlopeは、THR:スレッシュホールドから1066feet先に設置されています。
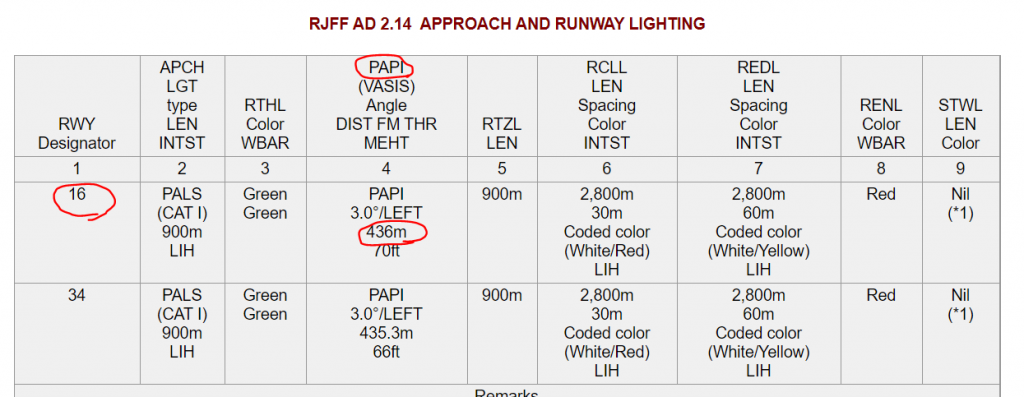
PAPIは436m先に設置されています。
以上過去の記述でした
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
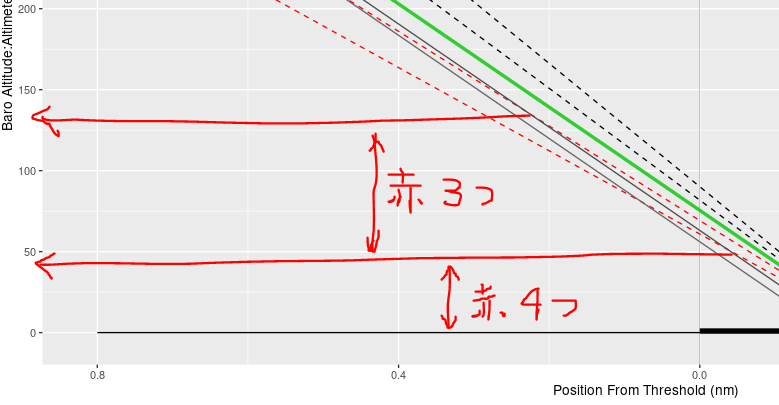
さて、E170型機のGlideslopeアンテナとパイロットの視点間距離は大雑把に2mであると考えます。
これらをアプリ:PAPIに入力します。
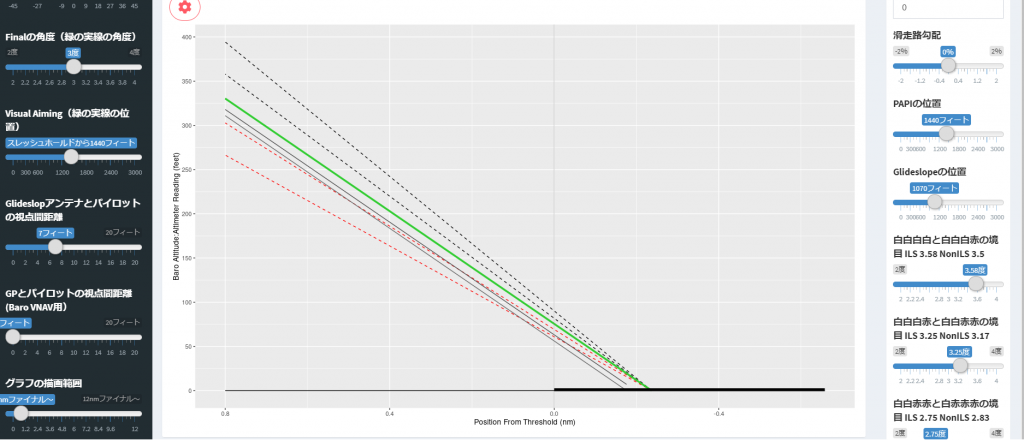
こうしますと、約130フィートで赤3つになり、約50フィートで●●●●になる事がわかります。
(なお、この計算は標準大気(海面で15度)で計算した上の高度です)
大雑把な説明でしたが、ポイントは2つです。
着陸する滑走路を選択する
自分が乗る飛行機の
Glideslopeアンテナとコクピットに着座したときの目の位置との距離をマニュアルや写真などから調べる
上記のお膳立てを済ますことによってアプリ:PAPIを使ってGlideslopeに追従してきたときのPAPIの色変化がわかるのです。
以上がILSのGlideslopeに追従してきた時のお話しです。
しかしながら福岡のRWY16においてILS進入が行われることは希です。
現在の空港レイアウトによるものですが、この話をすると更に複雑になりますので、悪天時を除くとRNAV16進入が通常行われるものして一旦理解して下さい。
つまり悪天時以外はGlideslopeに追従しないアプローチ(非精密進入)が行われるのです。
では、何に追従するのか?何を目標にするのでしょうか?
それはエイミングと呼ばれる地点です。
フレア開始前のお話しですが、この地点にパイロットの目が進む(滑走路に突き刺さる)ように操縦するのです。
そしてこの地点は、おそらく、パイロットの考え方と滑走路によってまちまちであると思います。
このように書いてしまいますと冒頭に記した現実世界の結果を知りたくなってくると思います。
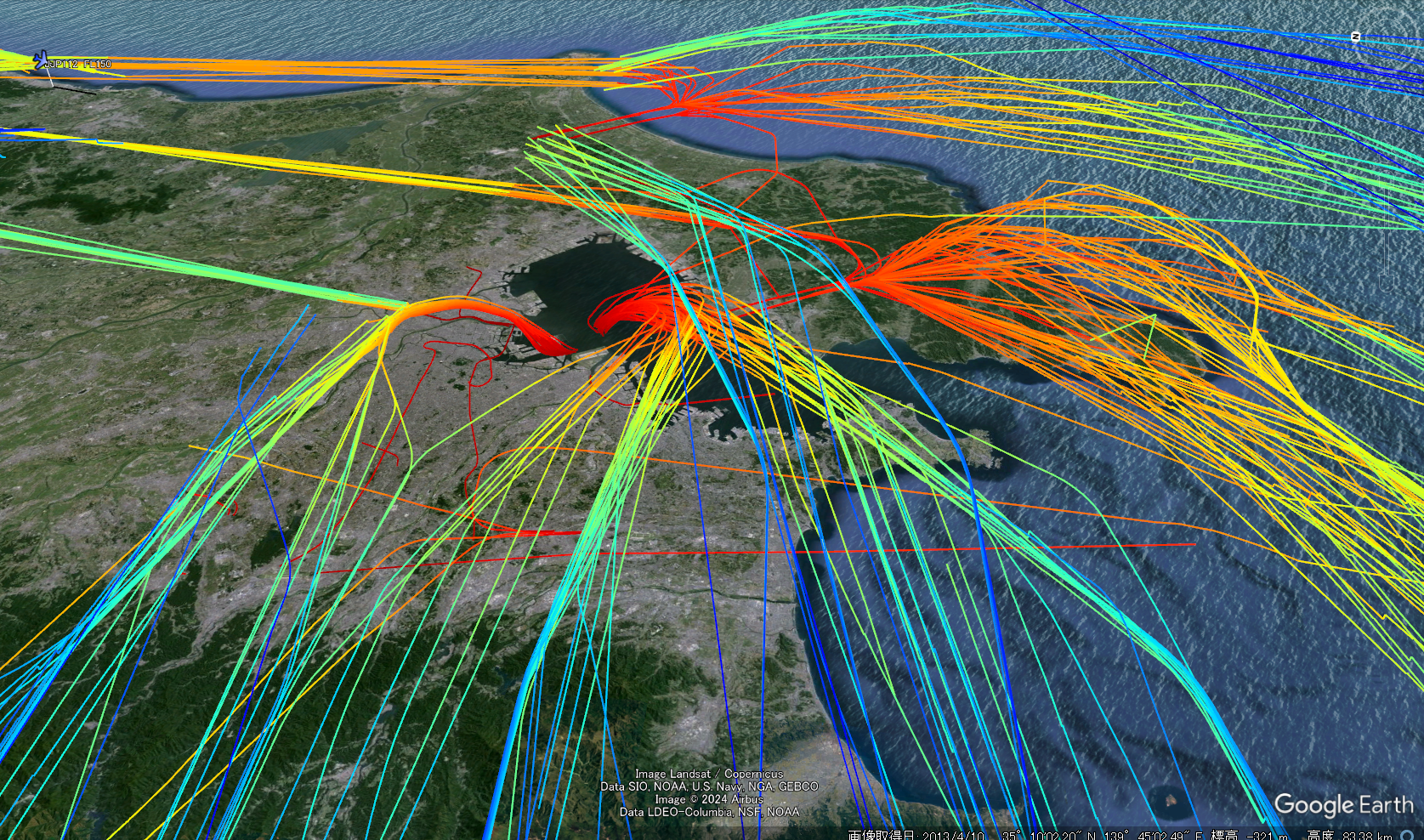
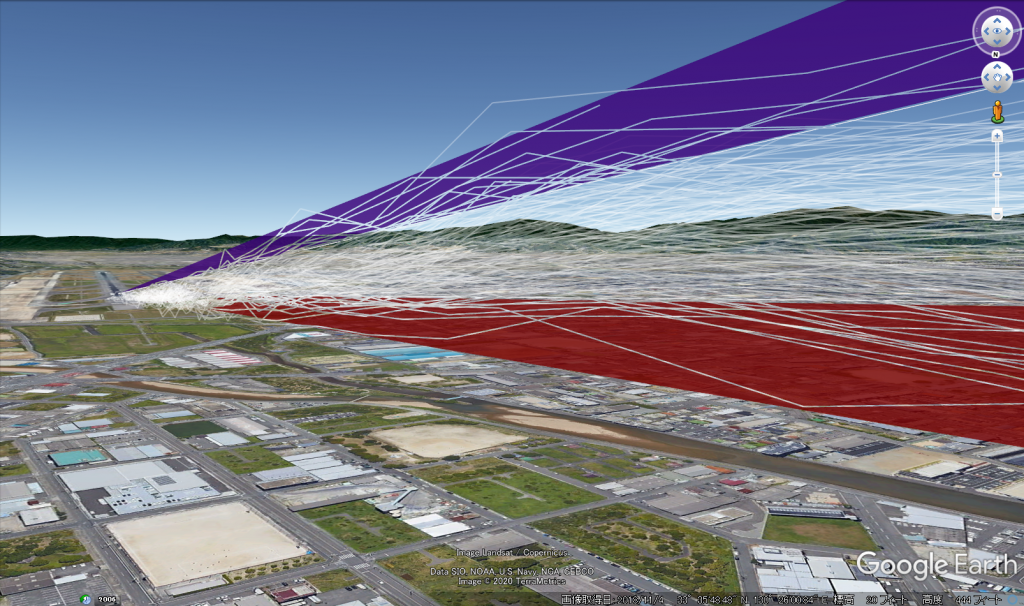
下図は福岡空港のRWY16に筆者と、副操縦士が(筆者の指導下で)E170でアプローチしたときの約400本の軌跡を白線でGoogle Earth上に描きました。また、PAPIの位置に合わせた紫の帯と赤の帯を配置しています。これによって筆者がどの辺をエイミングにしていたのかを知ることが出来ます。
紫の帯はPAPIが○○○●、赤の帯は○●●●のパスを示します。
軌跡が時々上下に波打っている事が気になりますが、実際の軌跡は安定しています。上下の波は記録時の計測誤差によるものと思われます。
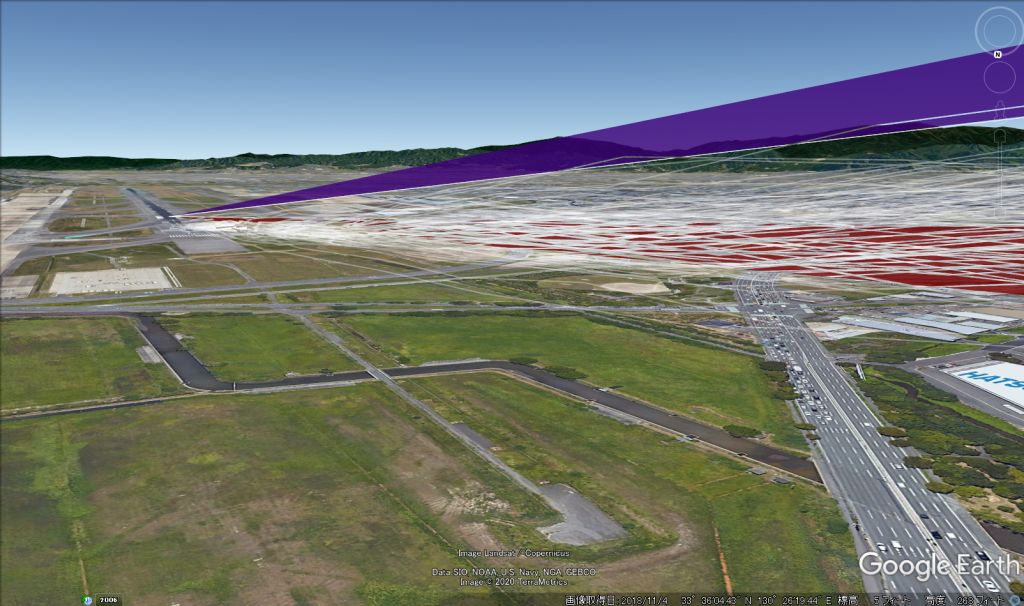
白い線のパスを見るとPAPIが○○○●(紫のエリア)で飛行しているケースはほとんど無く、○○●●もしくは○●●●(赤色のエリア)の範囲を飛行しています。
更に滑走路近くでは徐々にPAPIのパスから下に外れてエイミングに向かっています。
多くの空港においてPAPIのど真ん中○○●●を飛行してフレアを行うと、中型~小型サイズの航空機は望む接地点より遠くに伸びてしまう着陸になってしまいます。
望む接地点に接地するためにアプローチをすると、自ずと上記のような軌跡になります。
つまり、徐々にPAPIの下に外れる結果になります。
さて、ここで必ずしもそうでは無いのでは?と思われた方は普段からこの話題を掘り下げて考えていらっしゃる研究熱心なパイロットですね。
大変ややこしい話ですが、気象条件や滑走路の状態、アプローチタイプによってPAPIをどこまで追従するのかが変わってくるのです。
| 条件1 | 条件2 | ILSアプローチ | ILS以外のアップローチ |
|---|---|---|---|
| 視界良い | GlideSlopeに追従(悪天時の練習) | 最初はPAPIを狙い徐々にエイミング | |
| 視界良い | ILSを参考にした VisualApproachの 練習として | 最初はPAPIを狙い徐々にエイミング | |
| 視界良い | 夜 | GlideSlopeに追従 | かなり低高度までPAPIを狙う |
| 視界とても悪い | 雪に覆われている | GlideSlopeに追従 | かなり低高度までPAPIを狙う |
| 視界とても悪い | 夜 | かなり低高度までPAPIを狙う |
霧や嵐の中をILSアプローチで着陸された方ならばよくわかると思いますが、ギリギリの条件下:悪天のILSアプローチではPAPIが見えてきてもGlideSlopeをスレッシュホールド近くまで追従してパスの乱れを最小限にするように飛行します。
つまり、この場合はPAPIに追従しません。
一方、霧や嵐の中であって、例えばVORアプローチではGlideSlopeを使うことが出来ませんので、PAPIが見えてきた後は○○●●になるように維持して低高度まで飛行するのが一般的でしょう。
縦方向のガイダンスが無いため、ILSアプローチに対して不利なのですが、そもそもILS実施時よりも視程が幾分良好なので何とかなります。
PAPI関係の話はこのようにとても複雑で、うっかり議論すると、空回りを起こす原因になります。
従いまして、今回のお話は上表の青い太字で書いた条件が前提であるということで御理解下さい。
さて、この条件下でPAPIからいつエイミングに向かうのか?についてのお話しは、次回 PAPIとエイミングの関係2にいたしましょう。