Google Earthには2つあり、一つはアプリをインストールするGoogle Earth Pro,もう一つはインストール不要でウエブブラウザーで実行可能なGoogle Earthです。
今回はアプリをインストールするGoogle Earth Proを使用してプランニングを行ってみます。
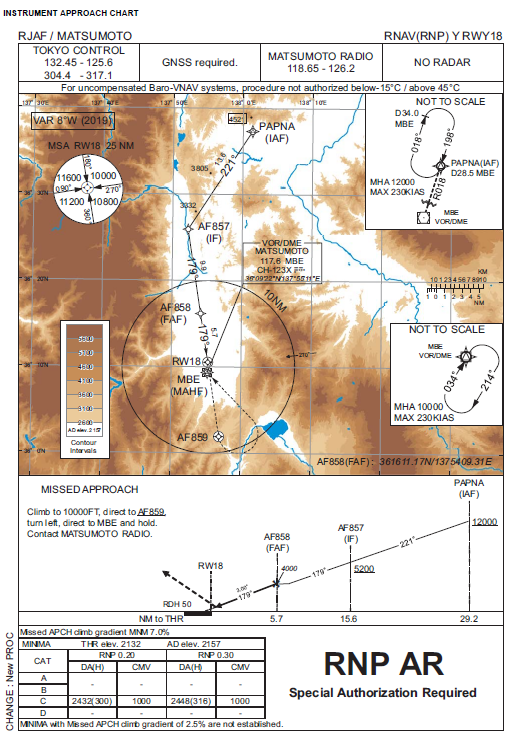
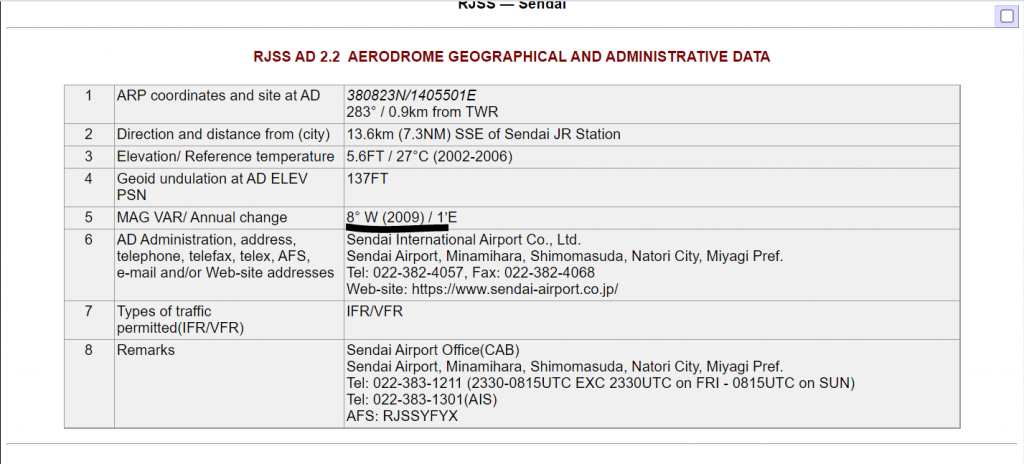
早速、仙台空港VOR27アプローチを例にして、非精密進入のプランニングをGoogle Erathを使って練ってみましょう。対象とする飛行機のカテゴリーはAです。
最初にGoogle Earthで使われている方位は真方位である事を紹介します。
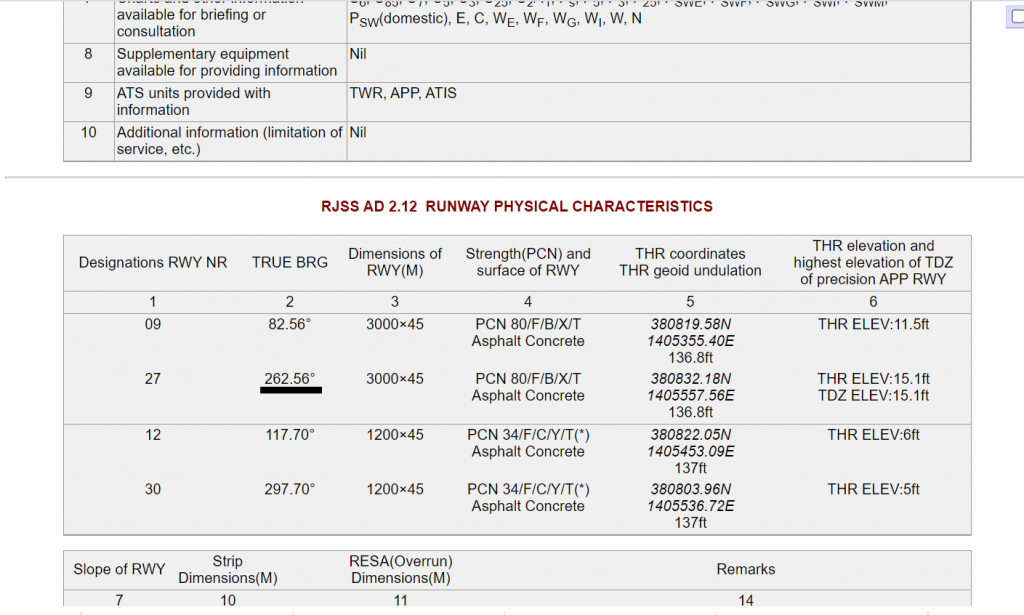
仙台空港の滑走路中心線の角度を測ってみますと262.56度です。↓

この値はAIPの真方位(TRUE BRG)と一致します。
そのためGoogle Earthで線を引くときに使う方位はMAG BRGにMAG VARを考慮しなければなりません。
MAG VARは8度Wです。ちなみに1年度毎に1分変化するようですね。(Annual changeの値)↓
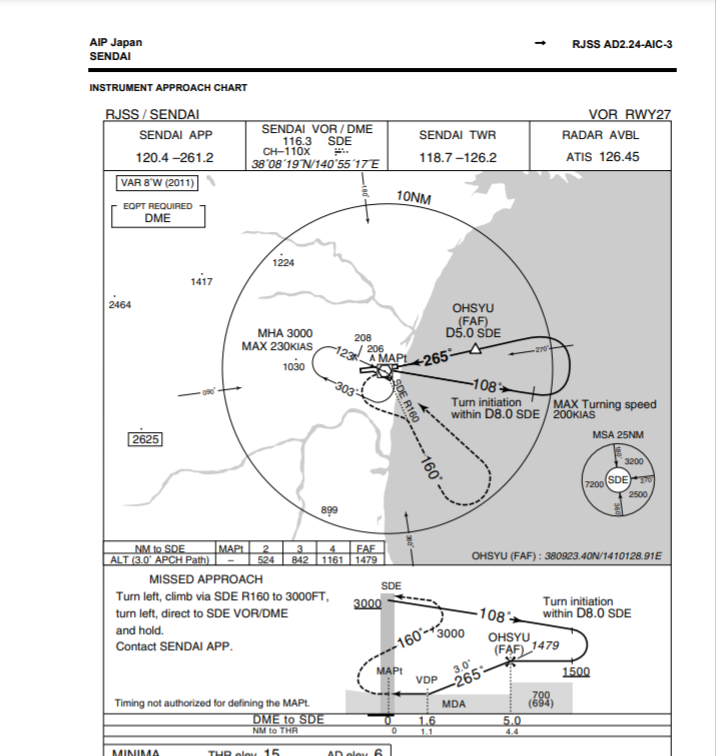
そのため下記のVOR27のコースから8度引いた方位で線を引く必要があります。↓
では早速線を引いてみましょう。
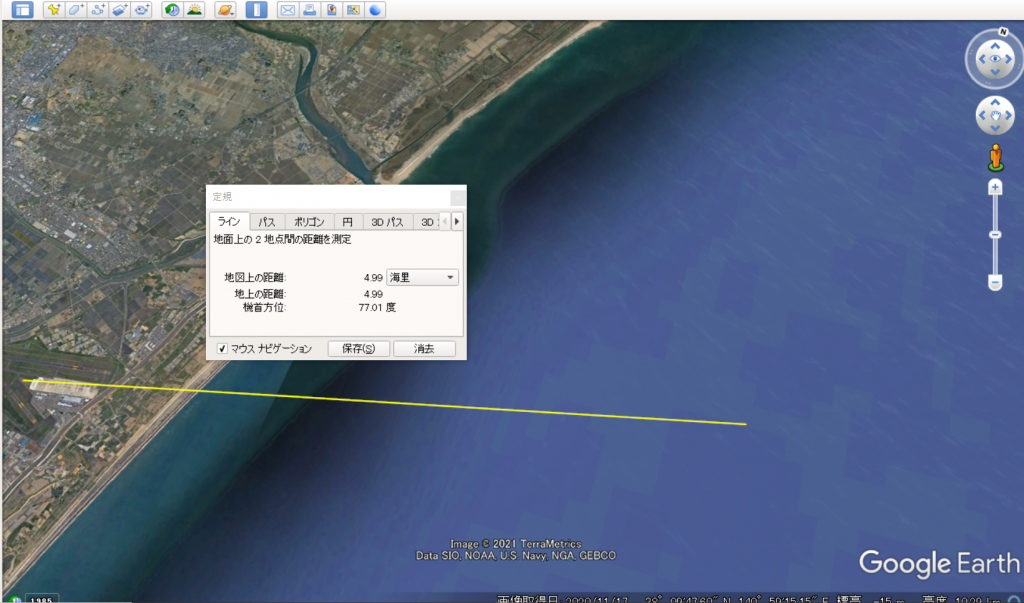
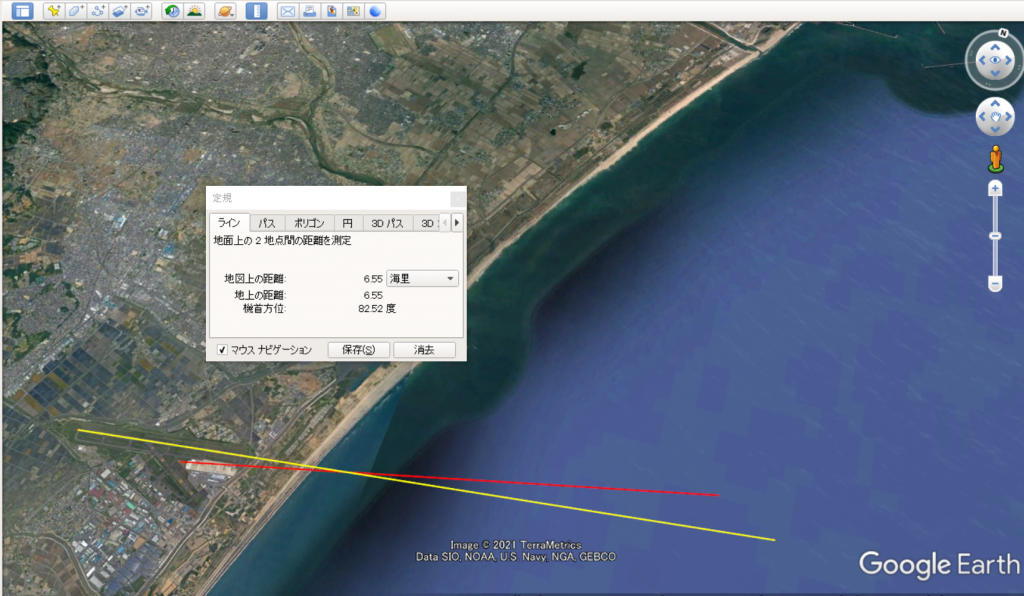
VORからOHSYU(FAF)までの5.0nmの線を引きます。画像からVORを探し出して、そこを出発点にした機首方位265-180-8=77度、5nmの長さの線を引きます。↓

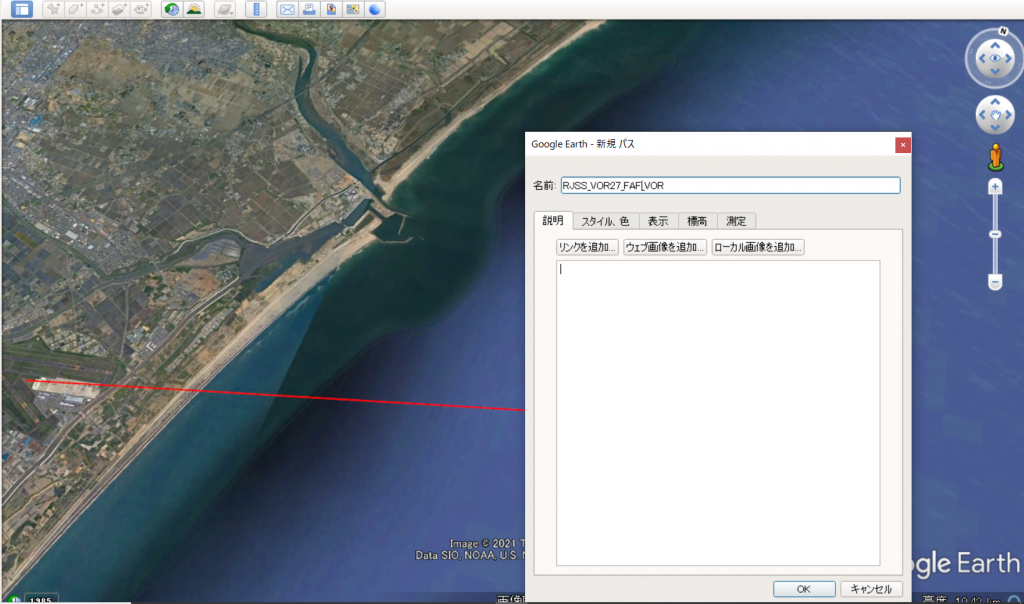
拡大をしながら線を引っ張り、ピッタリでなくて結構なので決定して保存をクリックします。↓
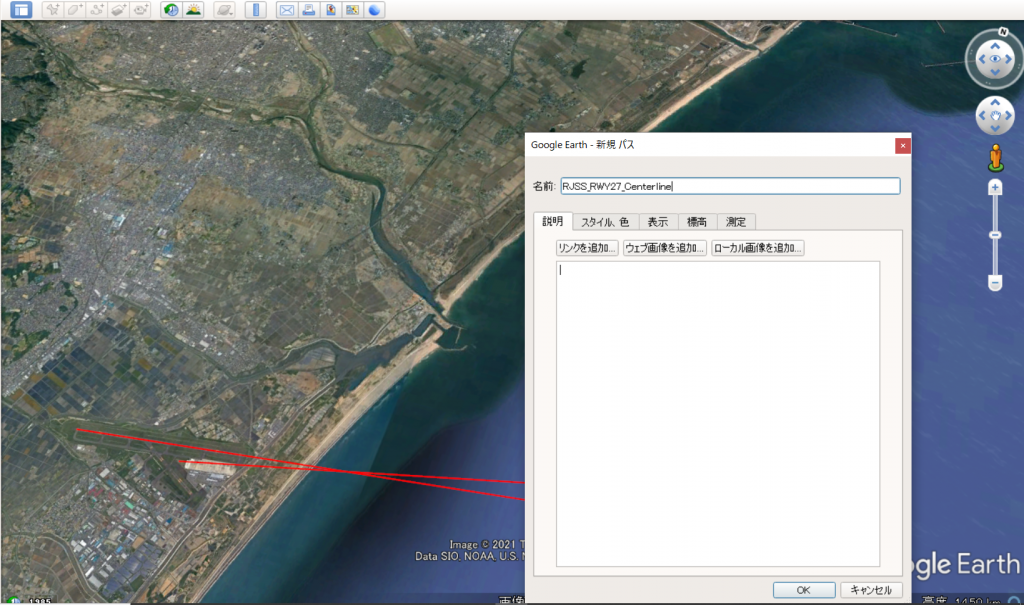
分かり易い名前をつけてOKをクリックします。↓
次は滑走路延長線を引きます。
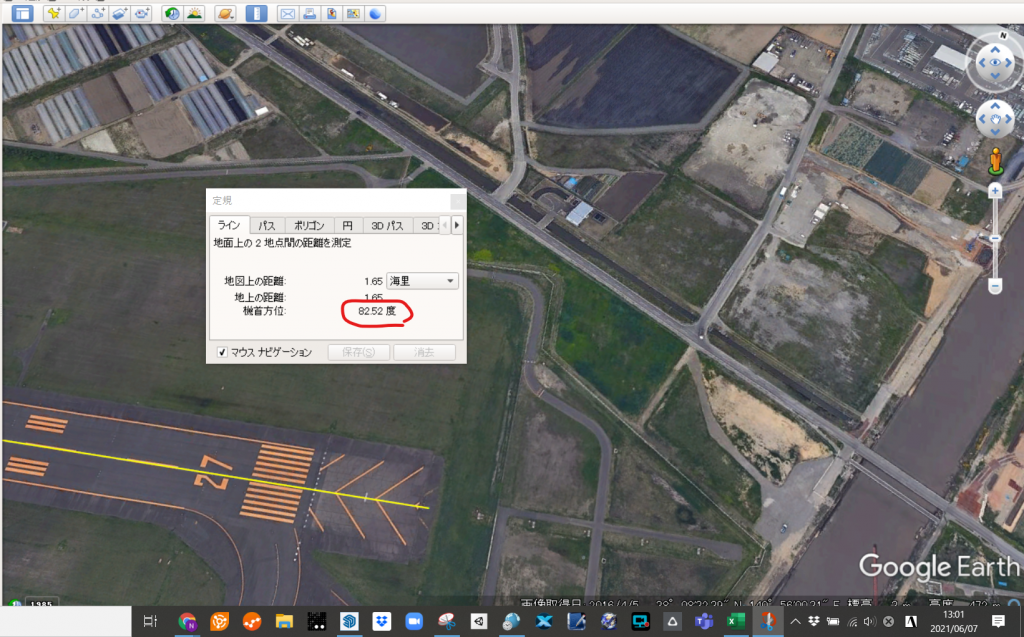
下記のようにRWY09の中心線からRWY27の中心線に延長し、方位を測定します。↓

82.52度になりました。↓
OKを押すと左の保留フォルダーに保存されます。↓
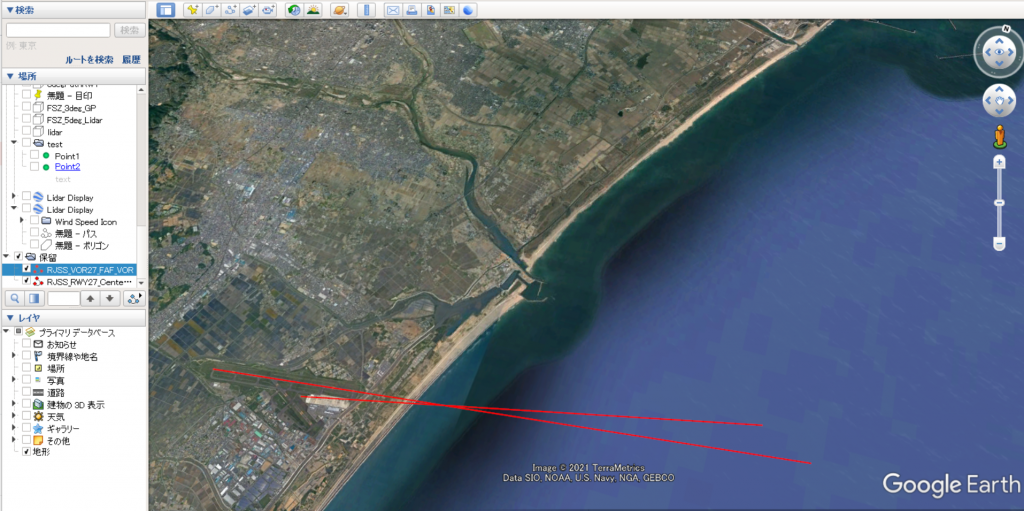
次は2つの線の交点、すなわちインターセプト地点にピンマークを立てましょう。
交点を表示させて、上の黄色いピンアイコンをクリックします。↓
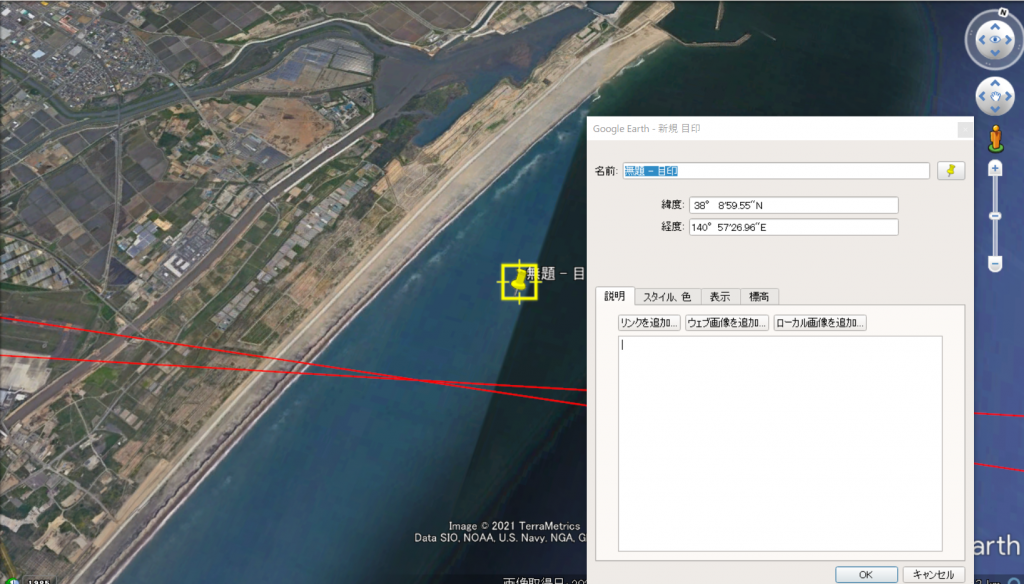
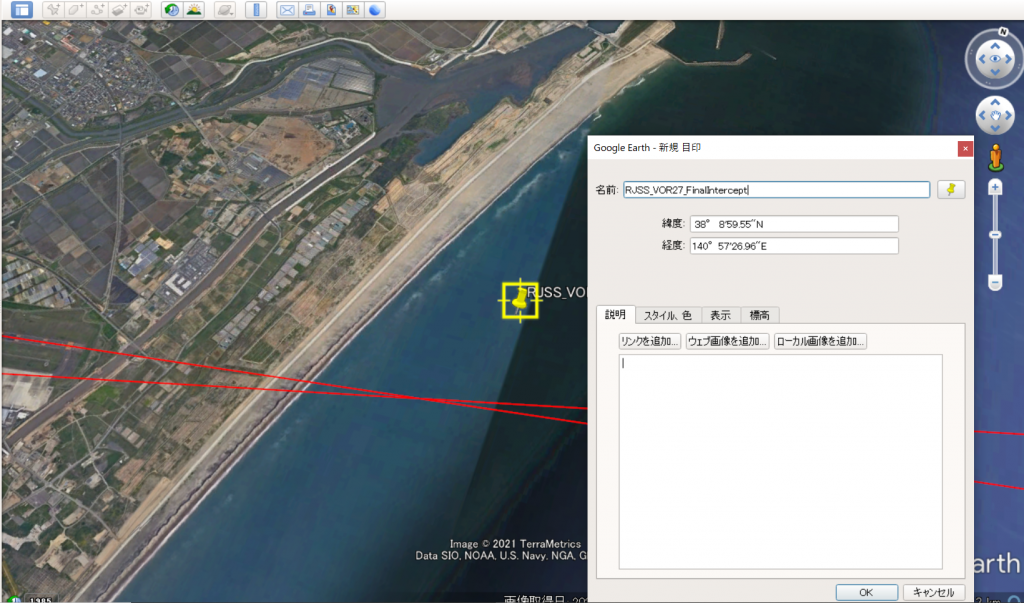
分かり易い名前をつけてOKをクリックします。↓
位置が正確ではないのでアイコンを移動させましょう。
アイコンを右クリックしてプロパティを表示させます。↓
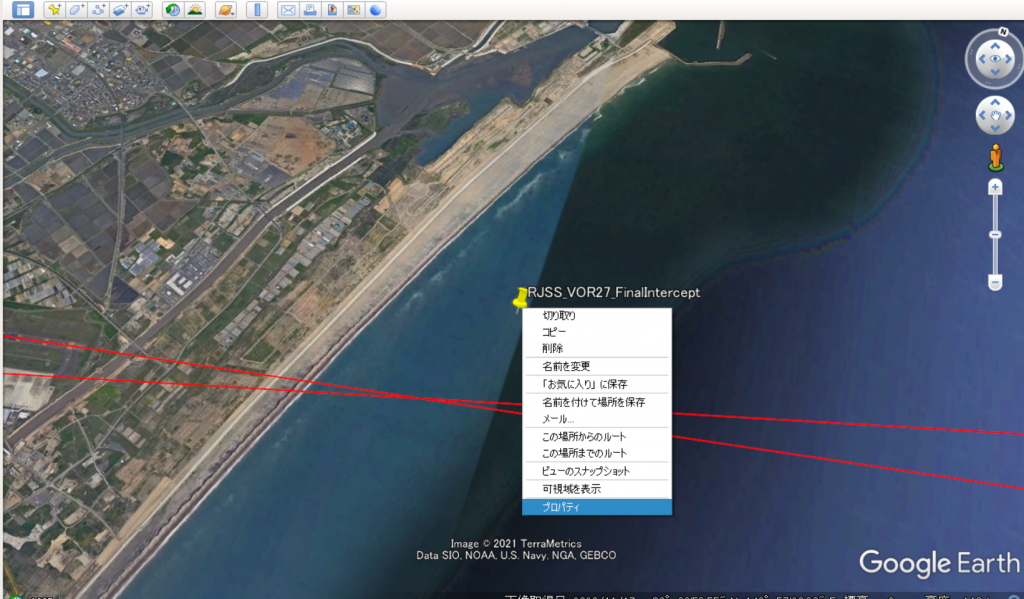
こうすると左クリック+ドラッグでアイコンを移動させることが出来ます。
交点に移動させてOKをクリックします。(ピンの先端が正確な位置です)
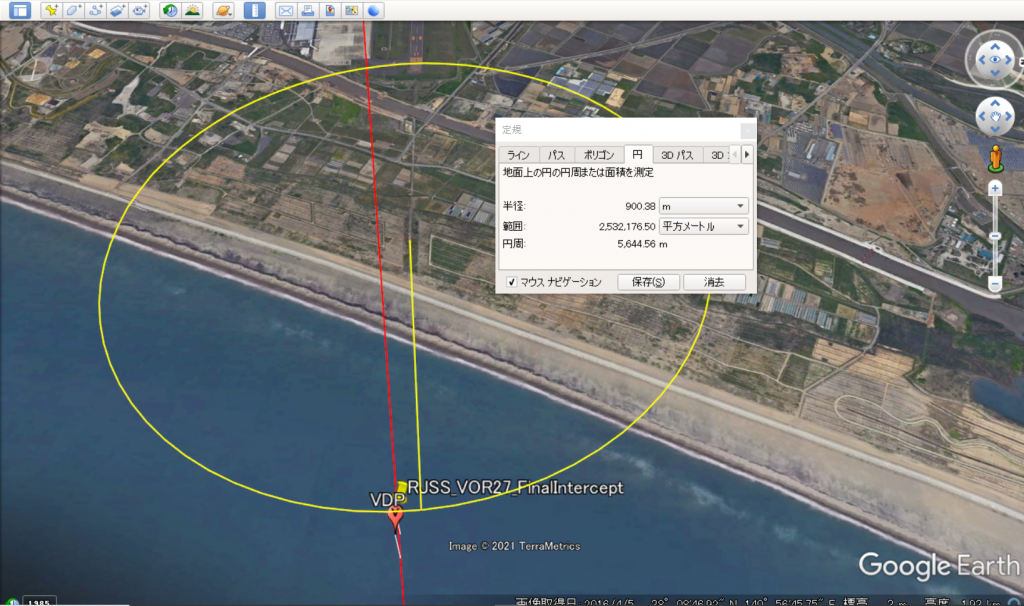
次はVDPの地点を特定します。
VDPはChartから1.6DMEの位置にあります。1.6DMEは1.6nmですね。
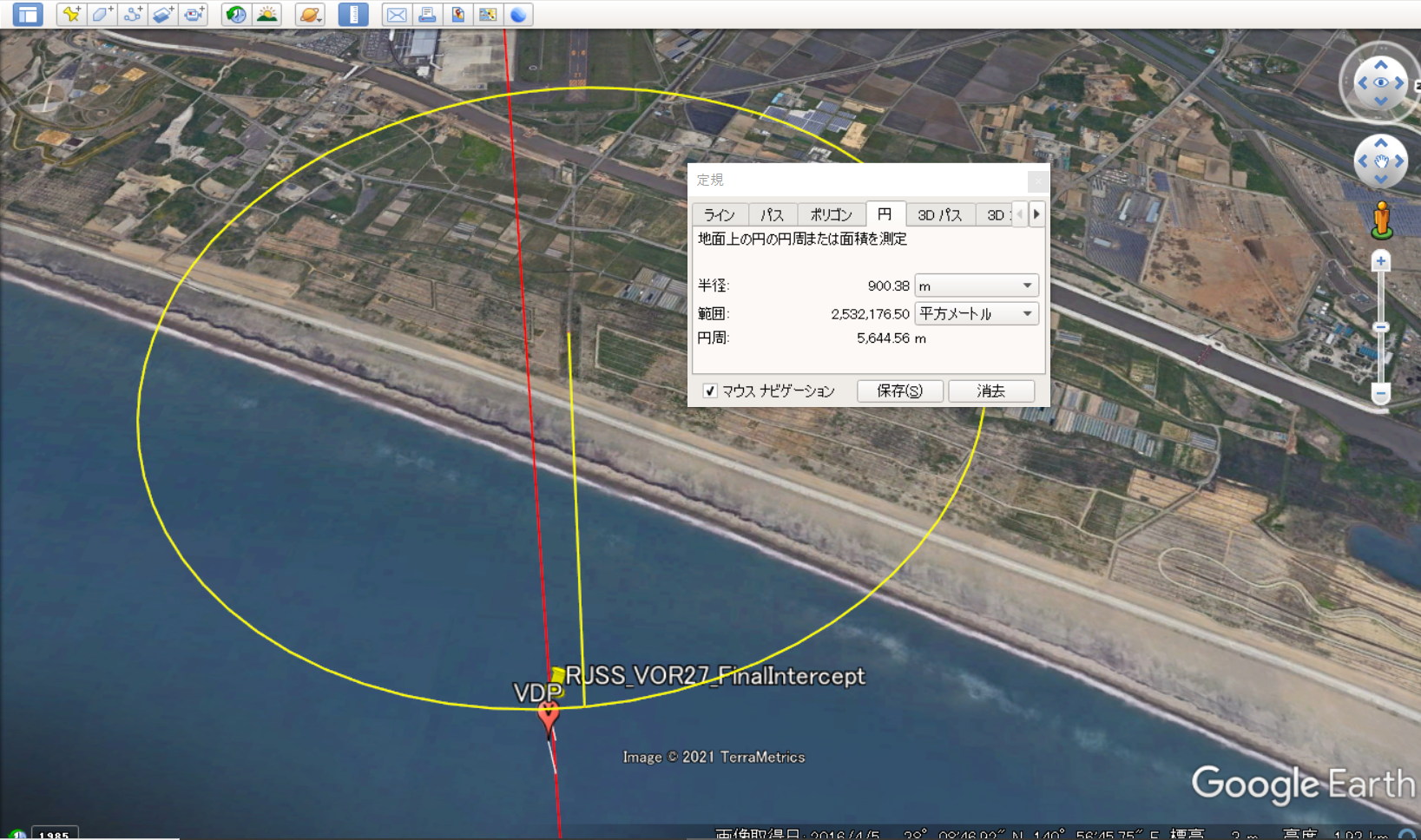
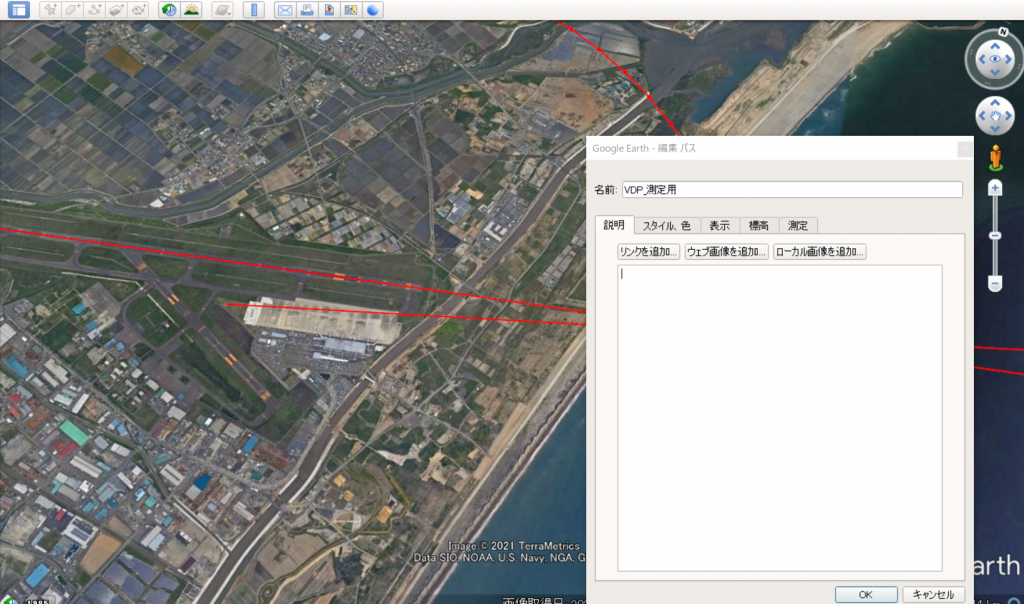
画面上の定規アイコンをクリックして、円を選び、VORを中心に半径1.6NMの円を描きます。↓
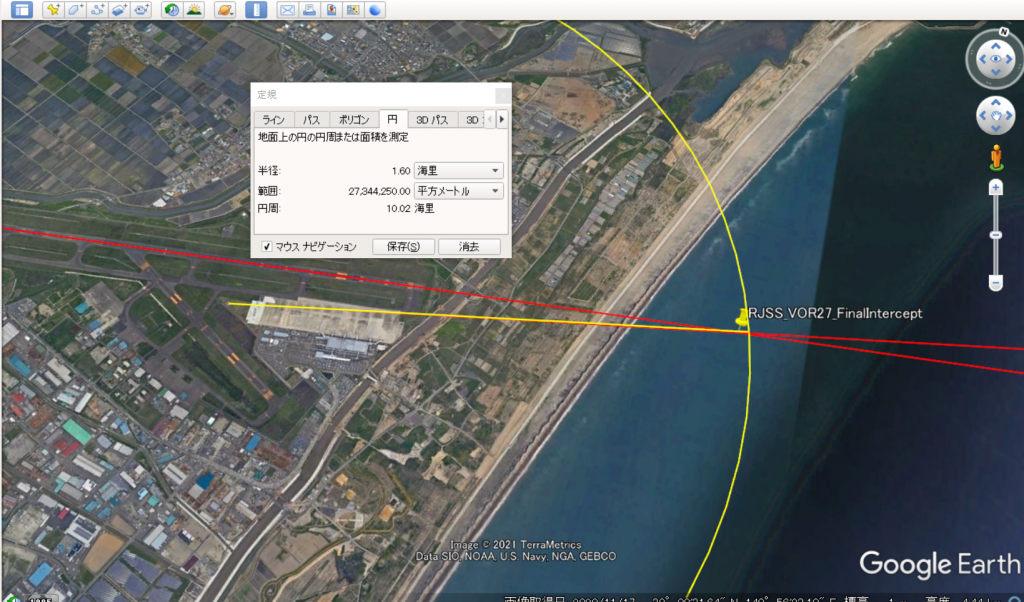
保存をクリックして、描き終わった円をVDP_測定用と名付けます。↓
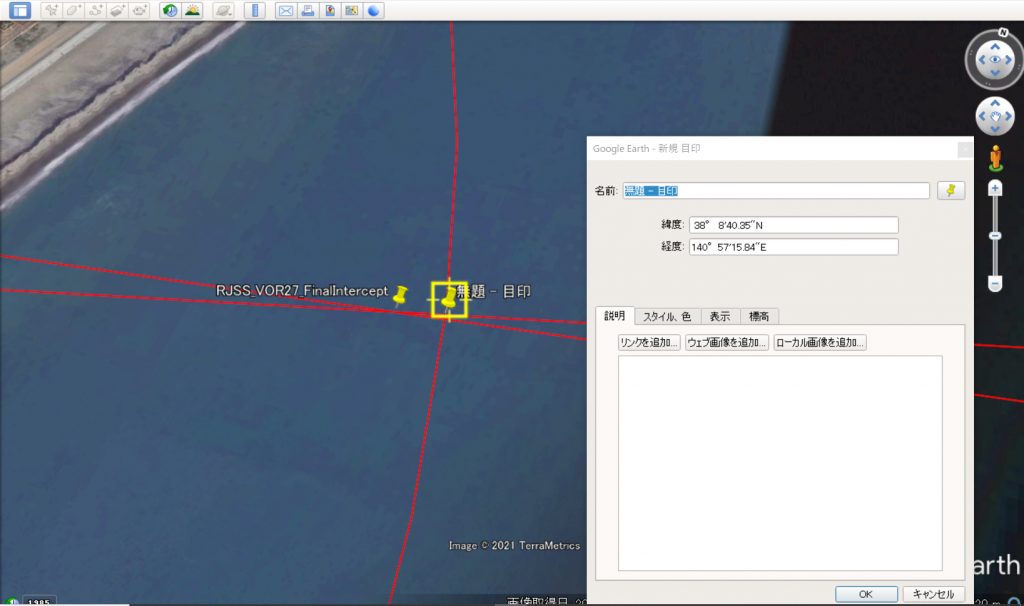
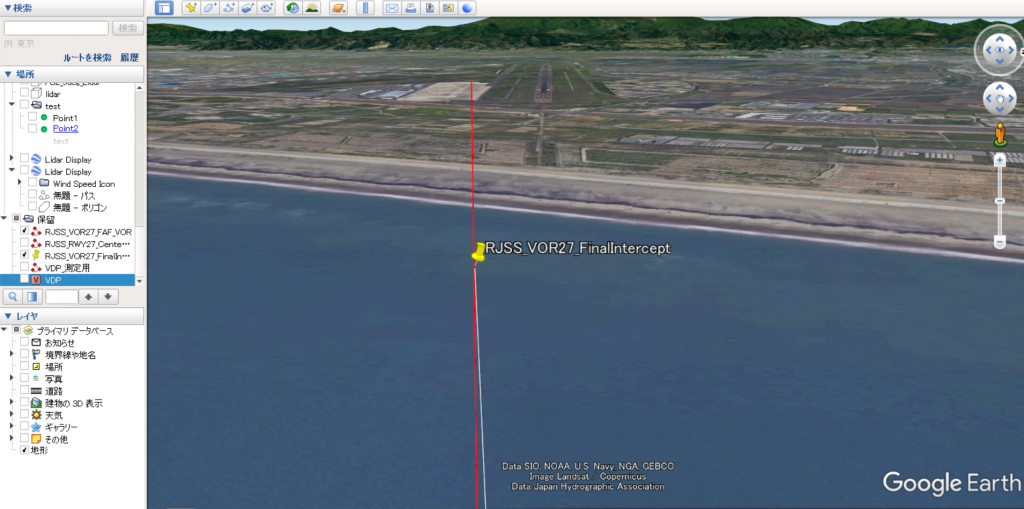
次にこの円とFinal courseの交点にピンマークを立ててみます。
交点を表示させて上のピンマークのアイコンをクリックします。その状態で出現した黄色いピンを左クリック+ドラッグすると移動できます。↓
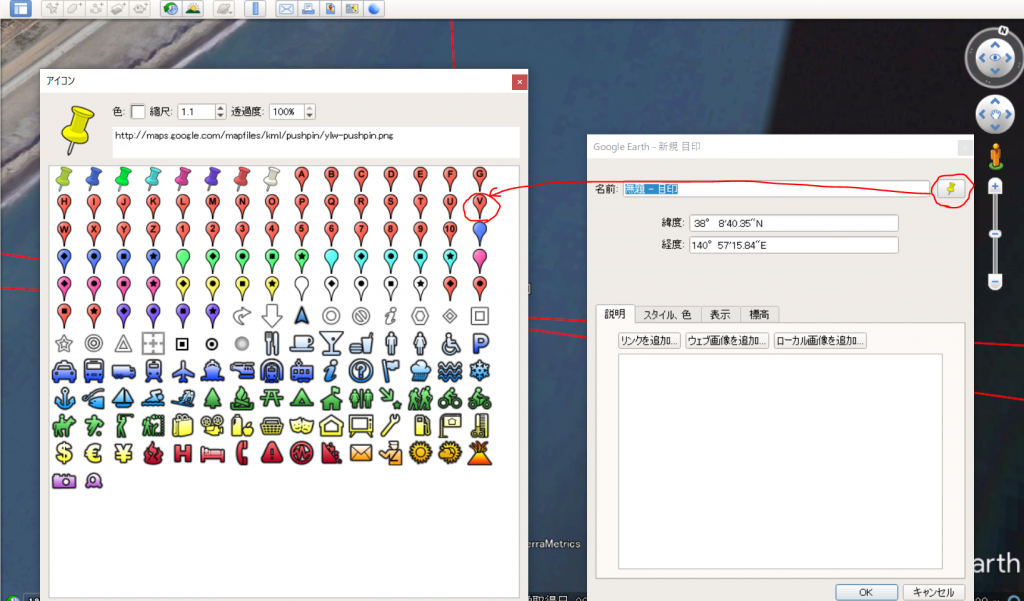
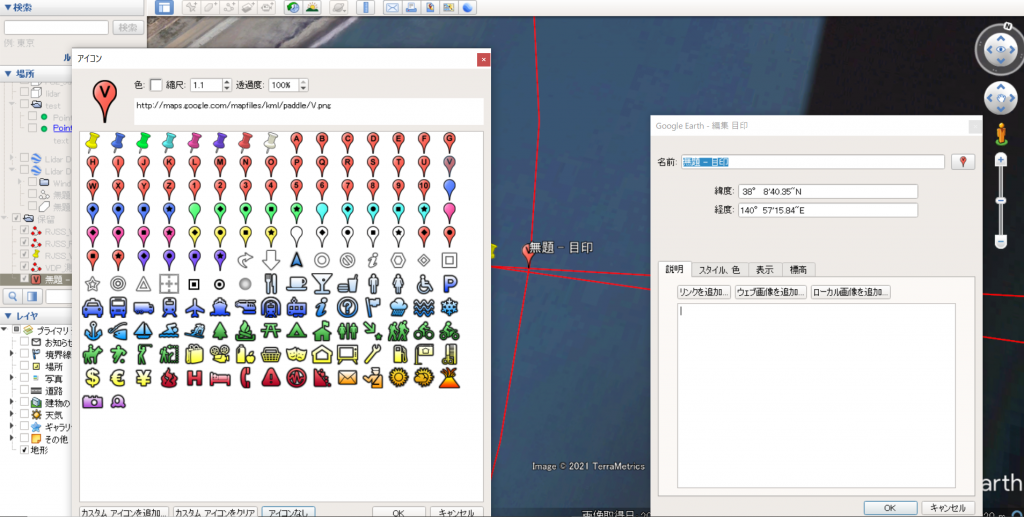
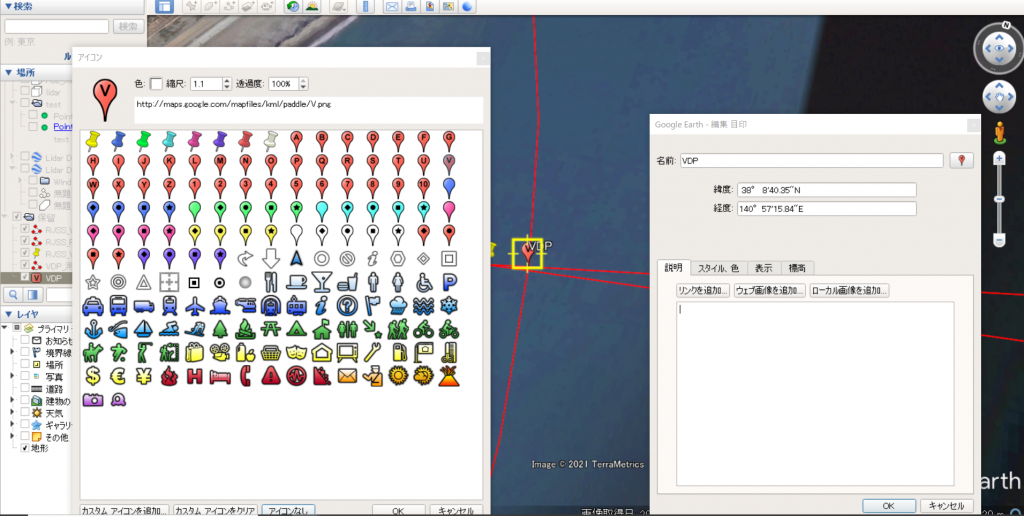
参考のために、ピンアイコンを変更してみます。↓
このように赤いVに変わりました。↓
名前をVDPにします。↓
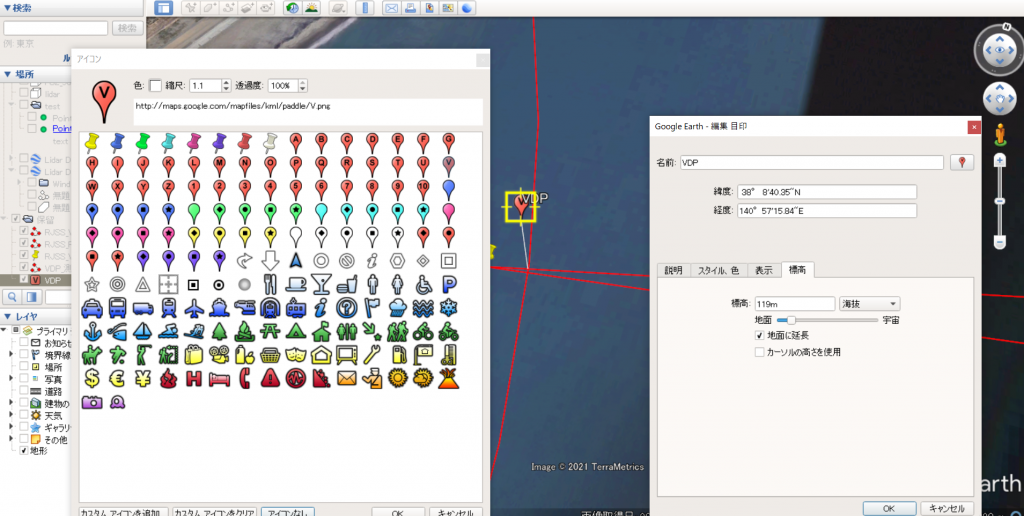
次にこのピンは海面上におかれていますが、高度情報を加えて空間上に配置してみます。
MDAは海抜390feet: 390*0.304≒119mなので海抜119m、地面に延長します。↓
試しにVDPからの見え方を確かめるとこのようになります。Google Earthでの視点の移動は少々難しく、慣れが必要です。↓
ピンマークを空中に浮かすことが出来たので、以前にマークして黄色いピンマークにした
[RJSS_VOR27_FianlIntercept]も浮かせてみましょう。
それにはこの地点で飛行機が何フィートにいるべきかを計算する必要があります。
定規アイコンをクリックして、VDPとRJSS_VOR27_FinalInterceptの距離を測ると67mです。
67mを3°パスから考えると高度差は67m*tan(3)≒4mです。
先ほどのVDPの標高は119mなので119m-4=115mとなります。
同じように標高を設定すると下記のようになります。↓
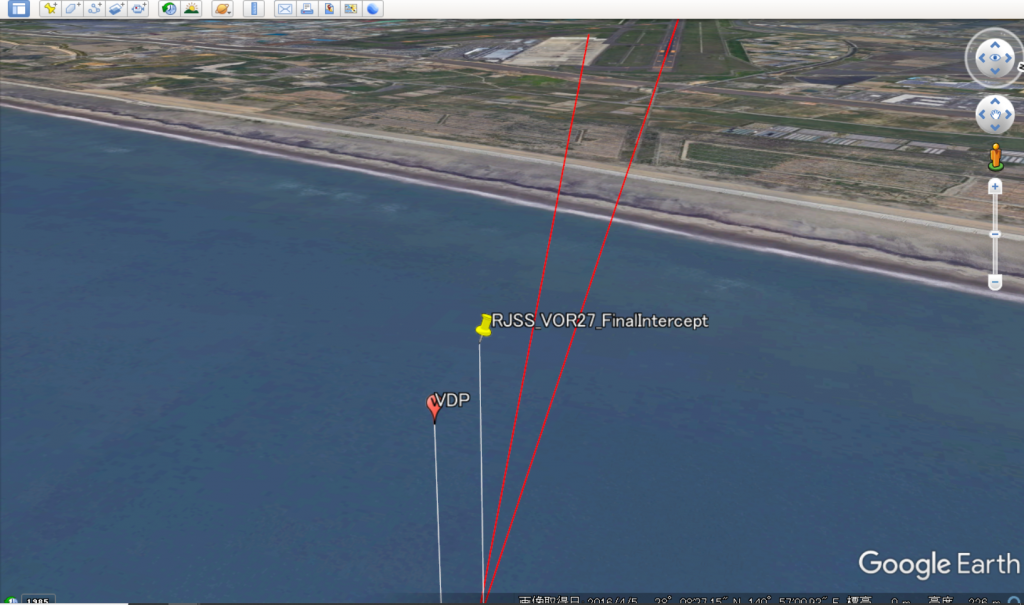
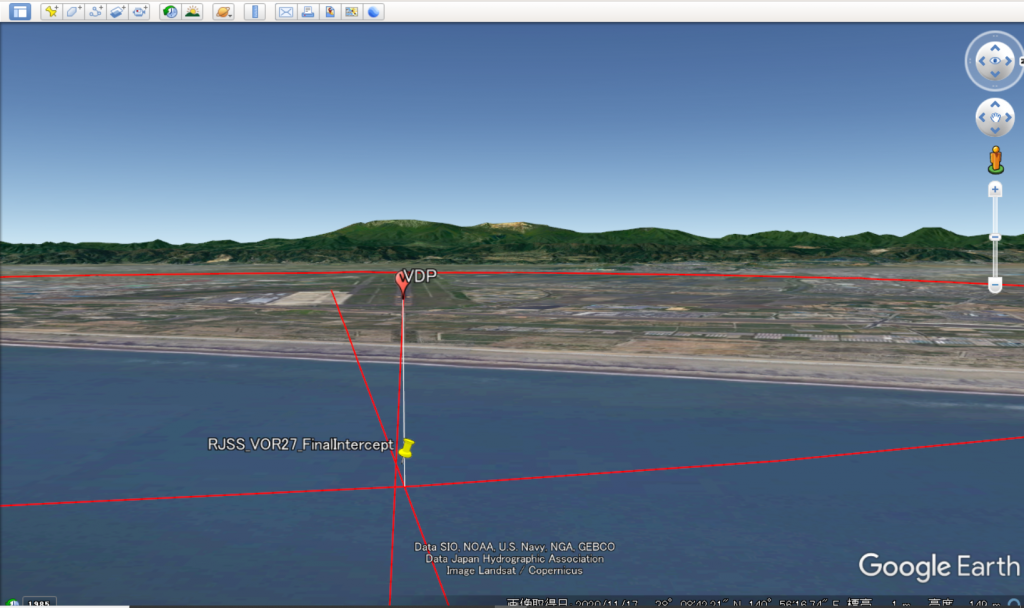
既に気がついていると思いますが、VDPとインターセプト地点は大変近いですね。
ワークロードが高くなることが容易に想像されます。
さて、この地点に視点を移動して、VOR方向を向くと、インターセプトする時のイメージが再現されます。
ファイナルコースとセンターライン延長の交差角度がよくわかります。↓
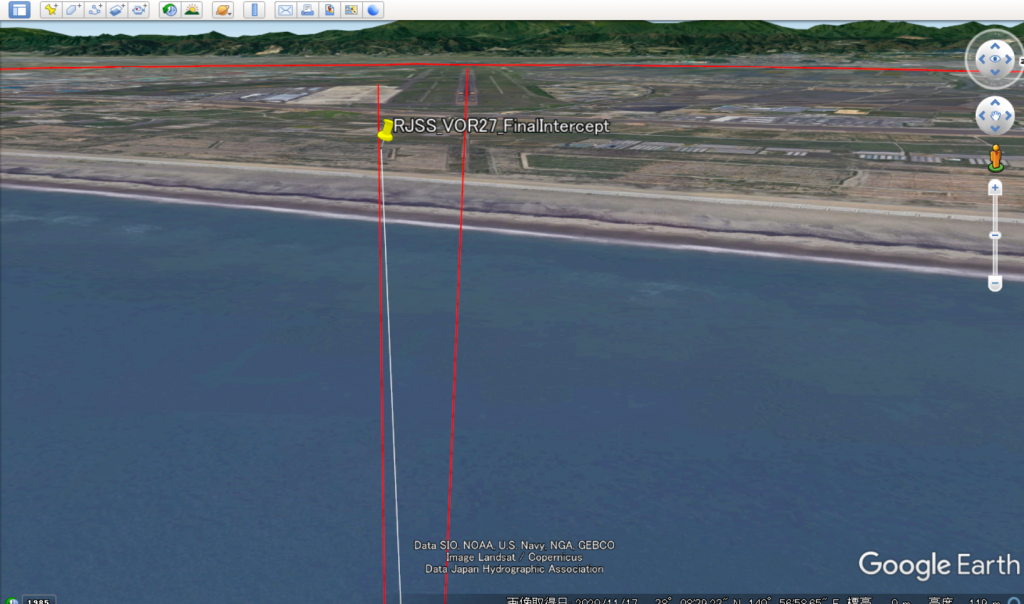
このままでは赤いラインが目立ってよくわからないので、左のチェックマーク(不要なラインとアイコンだけ)を外すと見えやすくなります。
このような感じです。↓
次にウエザーミニマギリギリの天候でどこで何が見えてくるかを調べてきます。
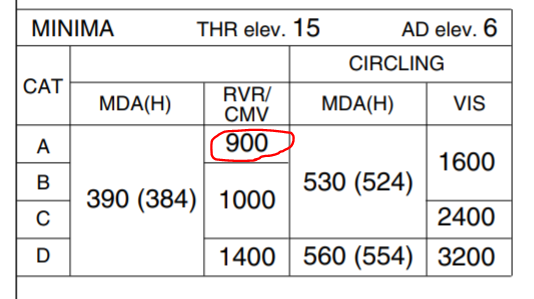
手始めにRVR900の値を使って、アプローチライトの先端がどの辺から見えてくるか、測定します。
先端の位置はグーグルアースをよく見て探してください。↓
VDPの少し奥という事になってしまいました。
この900mの地点に達するまでは全く見えないとすると、VDPで降下する事が出来なくなっていまいます。
本当でしょうか?
これは、RVRは滑走路での水平面での視程であって、パイロットが実際に飛びながら目にする視程は斜め視程であるという違いがあるからです。
斜め視程の方が水平の視程よりよく見えるので、現実はもう少し手前から見えると思います。
また、RVRとCMVの関係から考えてもR900mの場合はVISが900*1.5ですから、900mで考えるのは少し厳しすぎると思います。
この辺の設定基準は筆者も詳しくないため、このテーマは以上にしておきます・
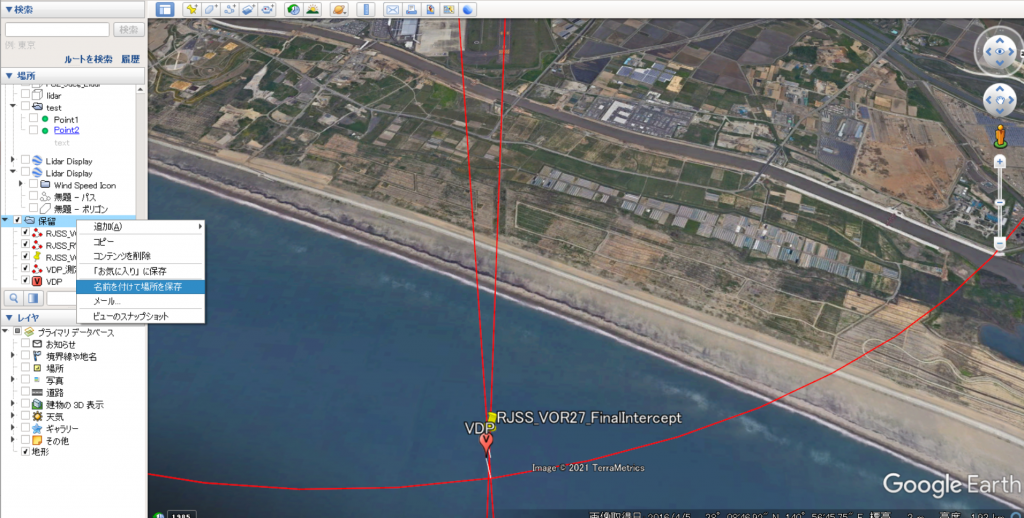
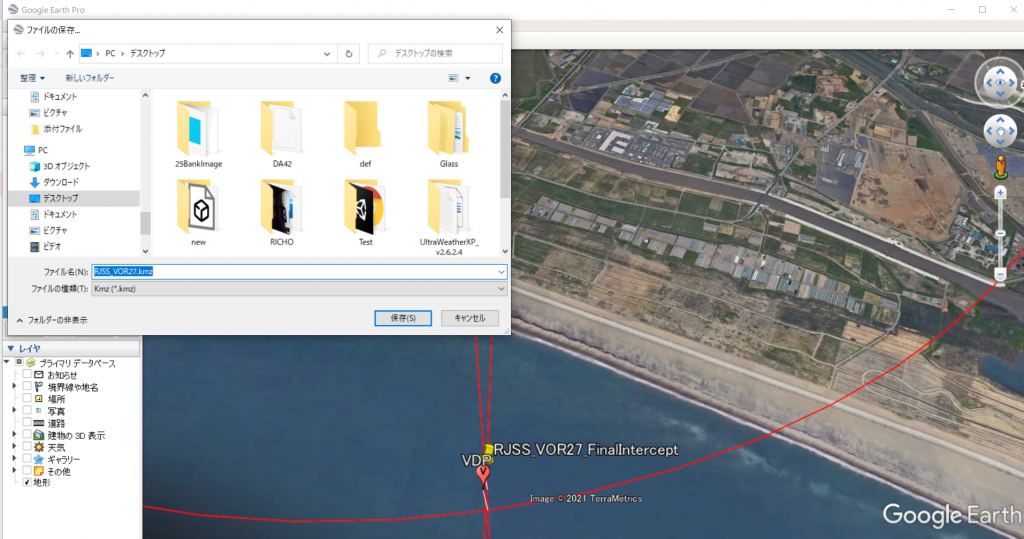
最後に今回作った直線、円、ポイントをKMZファイルにして保存します。
これによっていつでもこれをロードして修正も出来ます。↓
以上、Google Earthを利用してIFRのプランニングを行ってみました。
作図は慣れないと面倒ですが、トライすることによってInterceptする地点とVDPの関係、その時の滑走路の見え方を事前調査することが出来ました。
IFR Approachでは予習がとても大切です。
他にもGoogle Earthを活用できるテーマが沢山ありますので活用してみてください。
なお下記にこのVORアプローチをX-Planeで飛行した動画がありますので、今回の作図と一緒にご覧下さい。